
SG90舵机工作原理介绍
舵机控制的另一个专业名字叫伺服控制。
经过百度,伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
我们这次就是要控制舵机转动任意角度。
一、外观

接线方法:
红-------------------------VCC
棕色----------------------GND
橙色----------------------信号线
二、相关参数
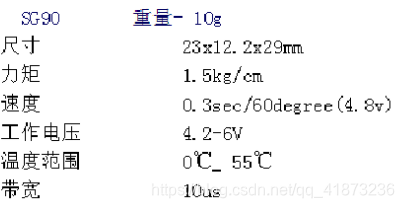
三、工作原理
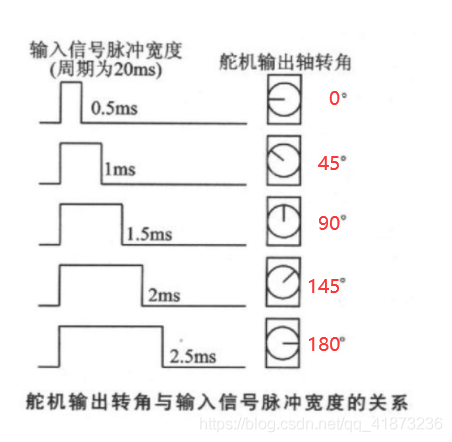
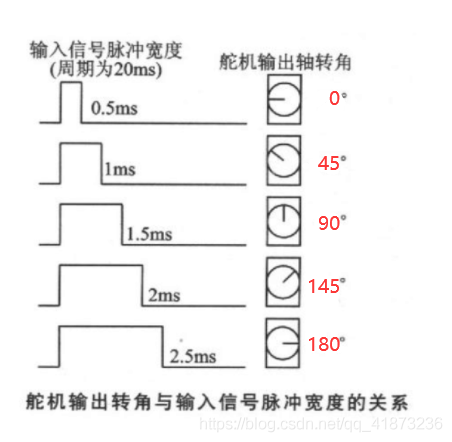
舵机的控制信号为周期是20ms 的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0—180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
控制电路板接受来自信号线相应的PWM控制信号,进而控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
舵机的控制需要MCU产生一个周期为20ms的脉冲信号,以0.5ms到2.5ms的高电平来控制舵机转动的角度。
四、舵机购买注意事项
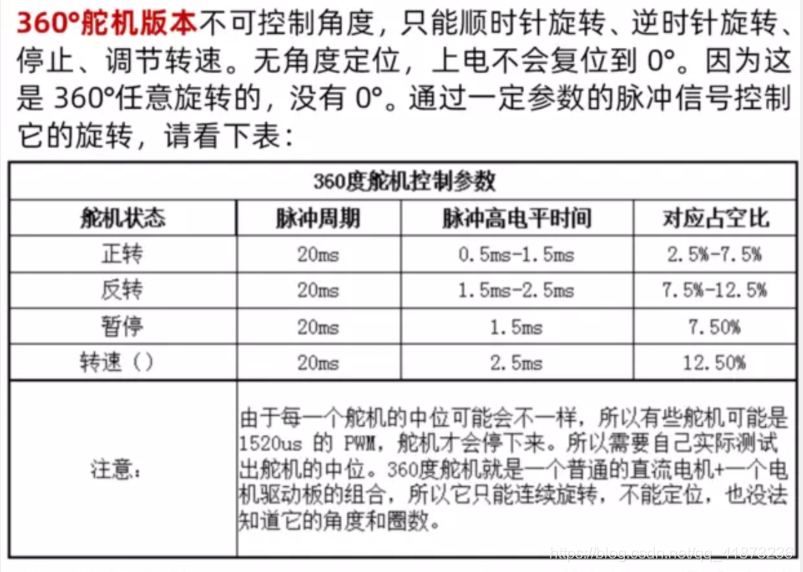
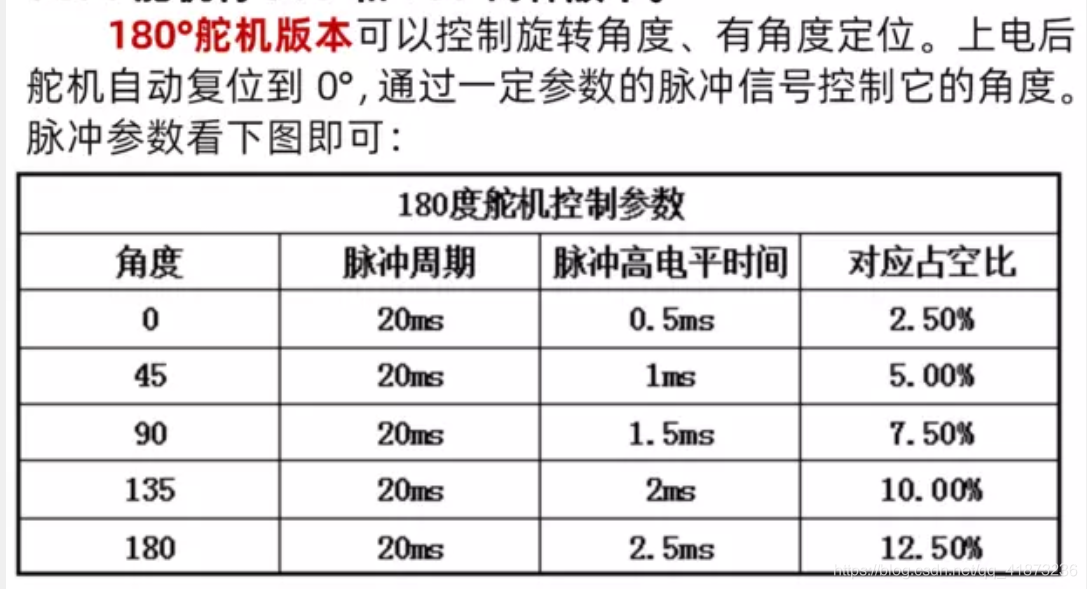
1、在购买时,需要分清楚你的舵机可以转180度,还是360度。相关区别购买时可以了解。
2、舵机又分为数字舵机和模拟舵机。
模拟舵机:需要不断的发送相应角度的PWM信号,才能旋转到指定位置。例如:我现在让它旋转90度,我就需要在一个时间内不断的发送90度的PWM信号,舵机转动到指定位置就会停止。
数字舵机:只需给一个目的地PWM信号,即可旋转到指定位置。例如:我现在让它旋转90度,我只需要发送一次90度的PWM信号,它就可以旋转到90度。
SG90舵机 是模拟舵机,SG90S舵机 我记得好像是数字舵机,总之数字舵机比模拟舵机好些,无论实在程序控制方面还是在运行情况方面都要好些
五、代码编写
舵机要用PWM来控制,PWM的产生可以用软件延时和定时器的方法。这里为了体现精确性,采用定时器的方式。
首先还是看下这张图片,这个是PWM控制SG90舵机的关键。我们只有按照给舵机输入正确的PWM波形,舵机才会转动到指定的角度。
// Include the Servo Library
#include <Servo.h>
// Rotary Encoder Inputs
#define CLK 2
#define DT 3
Servo servo;
int counter = 0;
int currentStateCLK;
int lastStateCLK;
void setup() {
// Set encoder pins as inputs
pinMode(CLK,INPUT);
pinMode(DT,INPUT);
// Setup Serial Monitor
Serial.begin(9600);
// Attach servo on pin 9 to the servo object
servo.attach(9);
servo.write(counter);
// Read the initial state of CLK
lastStateCLK = digitalRead(CLK);
}
void loop() {
// Read the current state of CLK
currentStateCLK = digitalRead(CLK);
// If last and current state of CLK are different, then pulse occurred
// React to only 1 state change to avoid double count
if (currentStateCLK != lastStateCLK && currentStateCLK == 1){
// If the DT state is different than the CLK state then
// the encoder is rotating CCW so decrement
if (digitalRead(DT) != currentStateCLK) {
counter --;
if (counter<0)
counter=0;
} else {
// Encoder is rotating CW so increment
counter ++;
if (counter>179)
counter=179;
}
// Move the servo
servo.write(counter);
Serial.print("Position: ");
Serial.println(counter);
}
// Remember last CLK state
lastStateCLK = currentStateCLK;
}